

Light autonomous guided pods for people / freight / technical services
Inexpensive, deployable about anywhere without the usual public works
Never requires expropriations
Designed to provide a complete alternative to the automotive in urban areas
Zero emissions, silent, quick, 24/7 availability
The AIDA solution for zero-car cities: CarLina
ABSTRACT
A_Cities have developed around cars and now need at least the following mobility services to just live:
- a network quickly reaching any place to a reasonable walking distance (can be 100-500m).
- 24/7 service.
- moving not only people but goods.
- all others like security, comfort, low cost, non polluting, silence, aesthetic...
- plus now a mandatory SUSTAINABILITY.
B_Existing public transport (PT) consistently fail to satisfy the above requirements.
- only the core in any city is reachable by PT, the rest not or by inefficient, slow buses. No "network" really exist, only disconnected lines becoming a network thanks to users' commutation. Hour-long trips have become the norm, even in small cities around the world.
- the rare automatic lines available are far from operating 24/7.
- goods of any significant size are only transported by cars/trucks ("automotive").
- exorbitant costs are the norm, with promiscuity and discomfort, excess crowd, pollution, noise, delays, degraded urbanism.
- sustainability is a dream.
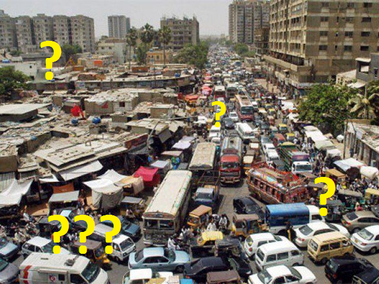
C_Requirements not satisfied by PT cause a systematic automotive city invasion, the sum of most nuisances. Not only are cities polluted and obstructed, they are disfigured and ruined.
D_The whole craziness appears to be an excellent business, which should have helped to understand the stability of this 'ecosystem':
- cities are so squeezed they pay through the nose billions for ridiculously partial "solutions" like 2km of a tram line in a suburb, which neither remove cars from the area nor prevent a general worsening.
- the so-called transport industry keeps offering ever more expensive, bulkier modes with the pleasure of seeing the issue growing faster than anything they can follow.
- car makers struggle to pile up ever more cars for people to just cross the few km from home to work.
- road and bridge construction flourish, adding the environmental issues of concrete to the (of course) high urban construction costs.
- should we add repairs, insurances, health etc.
E_the easy and inexpensive solution is in devising a PT system as light as cars to go everywhere 24/7, carrying people and goods automatically, extremely affordable because it is physically guided (as opposed of the unrealistic AV dream), not requiring a gram of concrete nor road areas, ad sustainable today.
- SEA proposes to treat the urban transport issue as a single engineering problem with one simple efficient systemic solution.
- Our criterion for success: that automotive (private+delivery) is made obsolete by the solution efficiency, thus requiring no other pressure on car users than the perceived advantage.
- Our technical approach:
-
- a cellular automaton the size of the city
- small, agile, extremely coordinated automatic multi-purpose pods
-
carrying not only passengers but goods, street work stuff: anything now requiring streets.
-
fast, safe, inexpensive circulation on elevated trackways, freeing the pedestrian ground
- A public domain business model with safety certification as the only jurisdiction
- Sustainability
- Politics
- Urbanists
- Transport managers
- Citizens, associations
- Environment
- Enterprises
- Education
- Permaculture
- Business model
The Urban transport issue is universally considered too complex and unsolvable
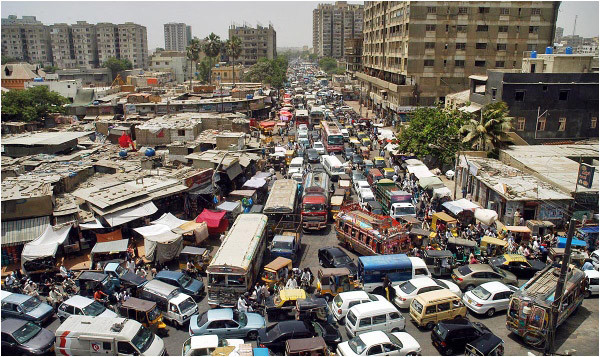
... de facto: nobody tried, or even looked for a general solution. Myriads of partial cures are proposed, from inserting ever more expensive and inconclusive buses/metro/trams/highways or complex "smart" arrangements - none of them intended to create a SYSTEM thus resulting in ever more cars and GHG.
Our criterion for a sustainable urban transport: that it get rid of automotive, at last.
- no more private cars (but we don't have anything against using cars in the countryside).
-
no more delivery trucks (nobody ever talks about them, even in the so called most advanced "green cities" because they keep the city alive. We keep the
service, not the nuisance).
- re-conquering the urban territory: sociability, pedestrian areas, biking, and walk-pace handling machines to serve the last 100-200m.
This humanized city goal is only approached in modern pedestrian areas, because on the lack of an efficient replacement for cars/delivery which are only pushed a few hundred meters away, and in most cases allowed at night. When we talk about zero-car it means they keep kilometres outside.
In the CarLina car-free area, the maximal speed is that of pedestrian. Loads, freight, disabled people, waste are gently carried at walk pace over the last 100-150m using ordinary load handling chariots.
In some larger avenues is the elevated network installed. It is silent, clean, much quicker than anything nowadays overfilling cities. It carries people and goods, effectively rendering private & delivery cars obsolete in the urban area and about 10 km around.
The solution is simple, much cheaper and efficient than anything currently proposed, and is designed for public-domain use.
Where are we now?
- There are no real sustainable cities project in 2016, mostly because city planners would at least need a method for cities to no longer be drawn around the automotive networks and nuisance.
-
Proposed solutions are partial, or even don't really care about sustainability, like adding traditional mode that are unbelievably expensive. It should be
said that urban congestion is before all a good business, and that local authorities brains have been trained to buy and buy again from the industry.
The absolute necessity of (a) solution(s)
- Climate change, pollution, upcoming conflicts and disasters should be enough of an incentive.
- The quest for better living conditions.
- Necessity of setting examples for a transition from waste-oriented to sustainable industries.
By the way, why is it still an unsolved problem?
-
Urban transport should first be posed as a (one definite -) problem, in the sense of problems posed to engineers. This essentially is a matter of business
model. Right now engineers get paid to design, build, sell, deploy, maintain old traditional technologies: train (1804), automotive (1880), metro
(1863), tram (1881), bus (1828) now expensive, inefficient but above all with such a lack of flexibility that they are condemned to being quickly exceeded by the demand, which is an ideal
basis for a profitable market.
-
One only needs to look at how slowly and carefully new modes, yet little innovative like self-service cars, where the innovation is in the property model,
are deployed. And this example illustrates another reason why cars stay: one feels at home in his car.
- What is perceived as an imbalance, unsafe situation from an environmental, urbanistic point of view is therefore very stable, safe and welcome from a business/financial point of view. In a world where collectivities have surrendered all powers into private, ie financial hands, urban congestion is good.
- This all explains why a start-up like SEA can solve the problem: 1) by posing it 2) not by a fantastic skill but because nobody else tried. Many companies interested in the close but different PRT story have played with engineering, but kept thinking inside the dominant business box.
- It thus also falls in our hands to imagine the business model compliant with sustainable cities.
How SEA poses the problem
"over a 2D perimeter, move whatever now takes streets and roads optimally from A to B with constraints:
- 24/7 operation, 1mn waiting time.
- point-to-point transport like the automotive (-is perceived to)
- zero emissions, including pollutants and noise
- aesthetic, comfortable, sustainable
- conserving the feeling of security one may have in its own car
- inexpensive to develop, deploy, own, operate, maintain, evolve, dispose, recycle"
What are the closest available techniques?
Not PRT. The above expression of requirements is extremely close to that of an electronics printed circuit board. Look at the amazing equivalences:
- transporting digital frames (=vehicles)
- packing bit sets (=people, waste bins, parcels, packets, loads), what engineers call "payload"
- do that on a 2D area the complexity of a city, the printed circuit board
- with the best latency (=waiting time) and bandwidth (capacity)
- while generating no noise (=no noise) and minimizing consumption (=oil)
- applying proper scheduling to even "evenmential requests" (=guaranteed no congestion)
- transport things (frames and bits) in absolute safety
- best done along serial lines (=streets)
etc.
This problem was correctly solved for decades, or no PC or phone would work. The best possible implementation of this knowledge, AIDA, is general and versatile enough to be directly transposed to the urban transport problem. An extremely rigorous scheduling method, just computing in advance any travel to the millisecond, is effective and compatible with anybody suddenly wanting to reach B from A.
From the user's point of view, the network is totally asynchronous and available on demand. From the system point of view, all travels are just behaving as scheduled, and scheduled they are such that congestion is an unknown concept, "missions" are always the fastest possible and burn the theoretically minimal energy.
Everything that isn't available now, to make a long story short.
The most important parameter: being fine grained
Just like cars were designed: imagine if they were bus-sized what flexibility resulted? Never would have they conquered the world.
Outdating the automotive implies the ability to transport on minute notice someone (and CarLina does more: something) at 3AM. never shall it be done with buses/tram/metro/train because 1) they cannot be available then and everywhere 2) there's no way this is profitable 3) this would be such a nuisance.
On the contrary a 2 meter long (smaller than a SMART ForTwo) pod, waiting for you the time it takes to reach the station shall go silently and even unnoticed, lights out, faster than all PTs wherever in the entire area, or at its border where cars are parked. A second pod could accompany the passenger's one with almost one ton of baggage.
More generally, small vehicles are light, which translates into way cheaper infrastructures, they can pass everywhere a car does, do not require digging huge trenches across a city, can be ready instantly when people use to patiently wait for buses to pass by. Fleet can increase and diminish quickly along with traffic demand.
The choice of a specific, elevated site for trackways
Contrary to popular belief ***, it would be extraordinarily difficult and costly to operate an autonomous vehicle in a real city, and attempts in this direction will lead to expelling all pedestrian activity, which is the opposite of a desirable conclusion.
A more desirable, and in fact sustainable way, is to keep ground areas for pedestrian/biking activities and move the traffic below or over. Below (tunnels) is very expensive and not modifiable once done, a terrible responsibility for the city planner. Elevated trackways are the best solution, from an urbanistic, engineering, financial and even visual point of view.
And because the CarLina system is complemented on ground with a last-200m reaching part, elevated tracks don't have to be visible everywhere, only on larger streets that are now full of noise, pollution, trucks, tram overhead cabling etc. and would be reconquered for green use.
*** to fund-raising communication, actually
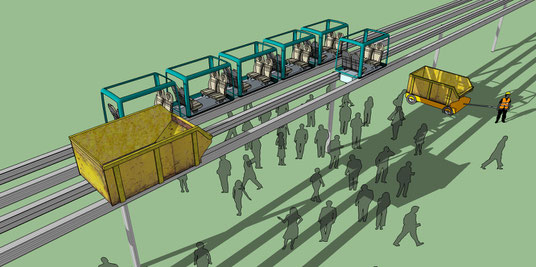
Since public transports definitely disdain carrying goods like palettes to/from shops, the disabled, waste bins... everything the automotive do, they are enforcing an infinite choking of cities by private and delivery automotive.
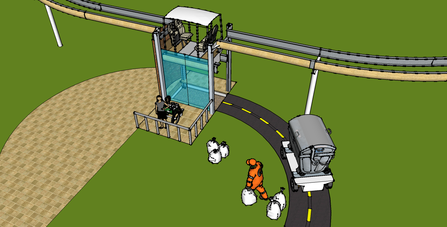
In the CarLina system, autonomous platforms operate regardless of what load is put upon. Standard passenger cabins are designed for receiving the disabled and lift them up/down in sort that they can access the network at each station just like a normal elevator, with a minute waiting time and delivery to the second whatever the destination.
The multi-purpose standard station lift can accommodate raw loads as shown above, palettes, standard containers. Platforms fitted with street work devices can collect the garbage and bring back waste containers that people put at dedicated places.
The logic behind a full mesh network
Network: contrary to popular belief it doesn't exist such thing as a metro or even a bus network. There are lines that become a network thanks to users' feet performing connections at some stations.
In the CarLina concept, this deriving from PRT works, a true point-to-point service is offered, in fact it would be more difficult to mimic the inefficient scheduling of the today so-called urban "networks".
Distance between stations: in a given social culture, there is a "refusal distance" to access a transport mode beyond which the user shall change its mind (ie take a car). In rich occidental cities this is about 100m and this is why bus stops will be set 200m apart.
In the CarLina system stations are spaced like bus stops, in order for users to have one 100m away from home. simple handling chariots are pulled on a "leash" by local people to perform the last 100-150m delivery and special handling (like a disabled person, a ton of bricks...).
Cost model: the expensive part of a network at its deployment phase is in trackways. To bring low deployment and maintenance cost, CarLina trackways are passive, not even having switches, just steel and a light but extremely efficient AIDA communication network for pods to manage everything from real-time (soft) crash management to mission bookings.
Costly railway elements like signalising systems and control centres are unknown in this cellular automaton.
A fully distributed architecture - network level
Trackways are made of self-supporting (in the mechanical and logical senses) elements who communicate with immediate neighbours and passing by pods.
Any track element continuously analyses its own behaviour on that of passing pods, the resulting mass of data feeding an extremely well documented distributed health management system.
Each pod monitors and directly communicates with its neighbours, and with the entire network through the trackways network.
Pods in turn continuously analyse and check their neighbours and the tracks, collecting parameters like the detailed status of the surface, structural responses, communication etc.
No other communication or "intelligence" is required, making the CarLina network a distributed system with safety and robustness levels vastly beyond anything deployed nowadays.
A fully distributed architecture - pod level
Controlling the pod is a small AIDA network made of six nodes:
- one in each wheel (x4), in charge of propulsion, ground interfaces, braking.
- bow/stern ones (symmetrical/reversible) in charge of inter-pod communication, monitoring and contact, trajectory safety and law of motion.
Note: CarLina being totally distributed, there is only a single law of motion for all the (or any) network
The safety and performance level of such a six-nodes AIDA system far exceed usual rail/aerospace standards, which is consistent with the absence of an external, central control system for CarLina networks.
Ongoing Development
Architecture, demonstration and feasibility works in 2016 concentrate on three strategic topics:
-
autonomous wheel-motor block (+1/6 of distributed platform control)
- the bow/stern navigation-routing-contact block
- finite state behavioural automaton at the platform level (the law of motion part).
Vehicles
A CarLina vehicle or "pod" is made of two parts 1) the autonomous platform 2) a functional load, in configurations:
- platform + passenger cabin
- platform + trucks/bins adapters for any type of goods, parcels, materials
-
platform + various technical apparatus such as street-work machines, including CarLina maintenance
Pods coordinate with each other to automatically perform any mission.
A mission possibly consists of 4 platforms with handling interfaces teaming up to catch, transport, deliver a 20' container, where platforms involved only use the trackway communication network to perform real-time, millimetric synchronization.
Trackways functions
Mainly: mechanical support, maintaining a seismic-proof trajectory, obstacle clearing, anti-intrusion, energy supply, network communication.
Optimized for the lowest possible sustainable cost, tracks are made of recyclable steel and are bent to an ideal 3D trajectory to both eliminate operating noise and bring energy consumption to an absolute low. This in turn makes for the lowest possible transportation cost, to the point that SEA proposes standard networks for free use.
Network behaviour
Pods share kind of a Taxi mentality, sharing their availability for any request. Each pod learns which parts of the network is best for it to load clients.
The network measures and checks passing pods.
Pods measure and check tracks and other pods.
Only pods recognized by their peers are allowed in the network, imperfect/suspicious ones are compelled to maintenance.
New pods or repaired/checked ones are accepted in the network with some mistrust until mutual checking is automatically conducted by other pods and trackways.
Traffic typology
-
"Taxi mode" vs "scheduled mission" ? This is very close in CarLina where the user books any move, for himself or a group or just parcels to ship, using some
station console, a smartphone, a desktop... Booking can be done from 10 years to min. 1 minute before departure. This minute is vastly enough for the network to bring the proper pod and
schedule a full-speed, congestion_free mission.
- The collectively scheduled mission shall be executed on time with a 100ms accuracy.
- Pods are prepositioned for loading freight, then depart to the scheduled millisecond.
- Over 90% of urban traffic comes down to periodic, predictable rush-hour missions, by chance the easiest to schedule and most likely to be reserved aeons before departure.
- Commercial speed is 36 km/h in town and 60 km/h outside. This is both slow in absolute terms and much faster overall than current urban modes.
The SEA goal
- Act as a system architect.
-
Define a long term, environmentally sustainable solution, which goes by protecting it from financial models. The engineering file shall be public domain and
local implementations submitted to certification.
- SEA acts as a counsel Ron local deployments to improve the general concept, and seeks retribution through its intellectual property.
- Should an independent consortium be formed, SEA would partner like cities would, bringing its expertise as an consulting member.
Urban congestion as a business model
Curing a problem requires the identification of its root cause. Astonishingly, urban congestion has never been analysed as a theoretical problem: maybe because urban automotive congestion is a good business, let's mention a few aspects of this:
- it is the best interest of transport industries to keep stacking up ever more expensive and, urbanistically speaking, inefficient "solutions", so that the problem becomes an endless source of growing profit. Representatives of the transport industry are much more direct and sincere than authorities when commenting the CarLina proposal: "that's sexy of a solution, but you're gonna kill the business with it".
- local authorities are submitted to a pressure from users and act as an intermediate body collecting from their very pockets astronomic amounts of money which are not only, as exposed above, inconclusive but creating masses of debt money - straight to the key of modern "economy".
- unaffordable amounts are not a limit, and quite the contrary: Public-Private Partnerships (PPPs) are the flavour of the moment, consisting of cutting large slices of public assets and just giving them away to private (financial) operators resulting in a pure alienation of tax withholding.
- consuming oil directly as fuel and in all its derivative forms is the best business ever.
It should be also mentioned in the side effects that local authorities have been culturally deprived of their ability to decide what technical/urbanistic decision is the best and conclusive for themselves. All what they are only requested is to open the access to public money.
As usual once the cause is known, the solution comes easy
- make CarLina a non-profit object in order to bypass the (yet) well-known mechanism described above and put it, in a strictly speaking "economic" action, under a public domain license.
-
create a club of user cities, which will host the applicable certification body
Ongoing actions
- Internally our prototypes are under construction in Brittany (France)
- We must contact all cities worldwide explaining that suffering is no longer mandatory, a solution exists.
- Explain about uniting cities in a defensive/offensive Club.
- Pedagogy, studies, encounters.
Financing
- building the prototype takes about 100k€ and is done on SEA own funds
- building a demonstrator track will cost 1M€ only, and SEA is looking for investors among:
- European Commission
- this is an extremely difficult and complex process
- SEA is too small in size to retain the Commission's attention yet
- European cities willing to solve their congestion/pollution issue
- being a city makes it very easy to get funded such a small amount by the Commission. A condition would be to federate 3 cities of 3 member states.
- the prototype can be turned into a demonstrator the into a pilot by choosing the proper location.
- Foreign cities
- New Delhi_we responded to a very rare (maybe unique) tender for a 13km long, high capacity line in Gurgaon.
- the above development financing need has been explained and waiting for a decision
- Dubai_we submitted a file to the Dubai innovation support initiative. This may be interesting in Dubai for two reasons:
- creating a very large, high tech, sustainable tool and market with tremendous worldwide effect in notoriety.
- Dubai is a good example of a modern and rich city facing the universal congestion/pollution issue, with no solution in the existing modes. The benefit would be immediate in both terms, plus a very important money saving for the city.
- International green innovation support
- welcome, especially from organization claiming to act toward sustainable cities.
- private sector
- welcome to finance a definite action for a city or urban areas.
- welcome, if they agree on the public domain deployment strategy. This is where the common interest of the world and the financial selfishness model encounter.
- New Delhi_we responded to a very rare (maybe unique) tender for a 13km long, high capacity line in Gurgaon.
- European Commission
- The certification of this new transport mode is expected to cost around 10M€. New regulations are necessary since the railways rules are not applicable. A CarLina system is way too light and
agile to be correctly described in Rail terms. SEA worked on an aerospace methodology from the start on, to serve as a rock solid foundation to the future light automatic transport world.
- Investors are informed that this step is an integral part of the development.
Use cases
Cotonou
Montréal
Libreville
Marshall Fery Hasibuan (mercredi, 08 avril 2020 11:08)
Great ideas for the better future the transportation.
There are no other innovation without creativity.
And no other options to avoid the technologies.
The very smart cities will come in the very near future.
Thank You Paul ORTAIS.
John Cleeland (jeudi, 23 janvier 2020 09:38)
A. Sustainability is ambiguous, but needs to be specific and include low energy, profitability and cross-subsidy for rural transport.
B. Better to name, road safety, slow trips and subsidies.
C, D, & E. Agree, including SEA box, and the criterion, except that the process should be: due diligence; a test track; a pilot route; the urban network; then rural network. The conversion should be by choice, with speed, reliability, accessibility and attractiveness the telling factors. Once there is a large take-up, the urban environment will be improved, but its form will need to evolve.
The circuit board analogy is flawed, because there are a limited number of routes, serial queues must be avoided, zero wait time is better, unloaded running is too much and expensive. Contrary to your assertion, some PRT better meets the requirements.
Some routes require one vehicle per second, that is not possible with in-line stops. Suspended vehicles can be half the weight and have only a single track and are therefore cheaper. Suspended vehicles are more comfortable during stopping, on curves and on grades. Grades can be 1 to 1 so stops can be on ground, with parallel bays.
Metrino PRT is designed to operate at 70kph in urban areas and TransitX is faster.
Erwan ROHOU (mercredi, 14 février 2018 08:11)
This is indeed a very interesting approach.
Though, millions of daily commuters will certainly require millions of pods on the network. Is the global flow rate from origin to destination comparable to mass transport solutions ?
Thank you for sharing Paul ORTAIS
P. H. Tashik (samedi, 26 août 2017 20:36)
I find the idea amazing. When do you expect to begin operations and where?